








CCD視覺定位激光模切機校準與誤差控制
來源:博特精密發(fā)布時間:2025-11-05 10:12:00
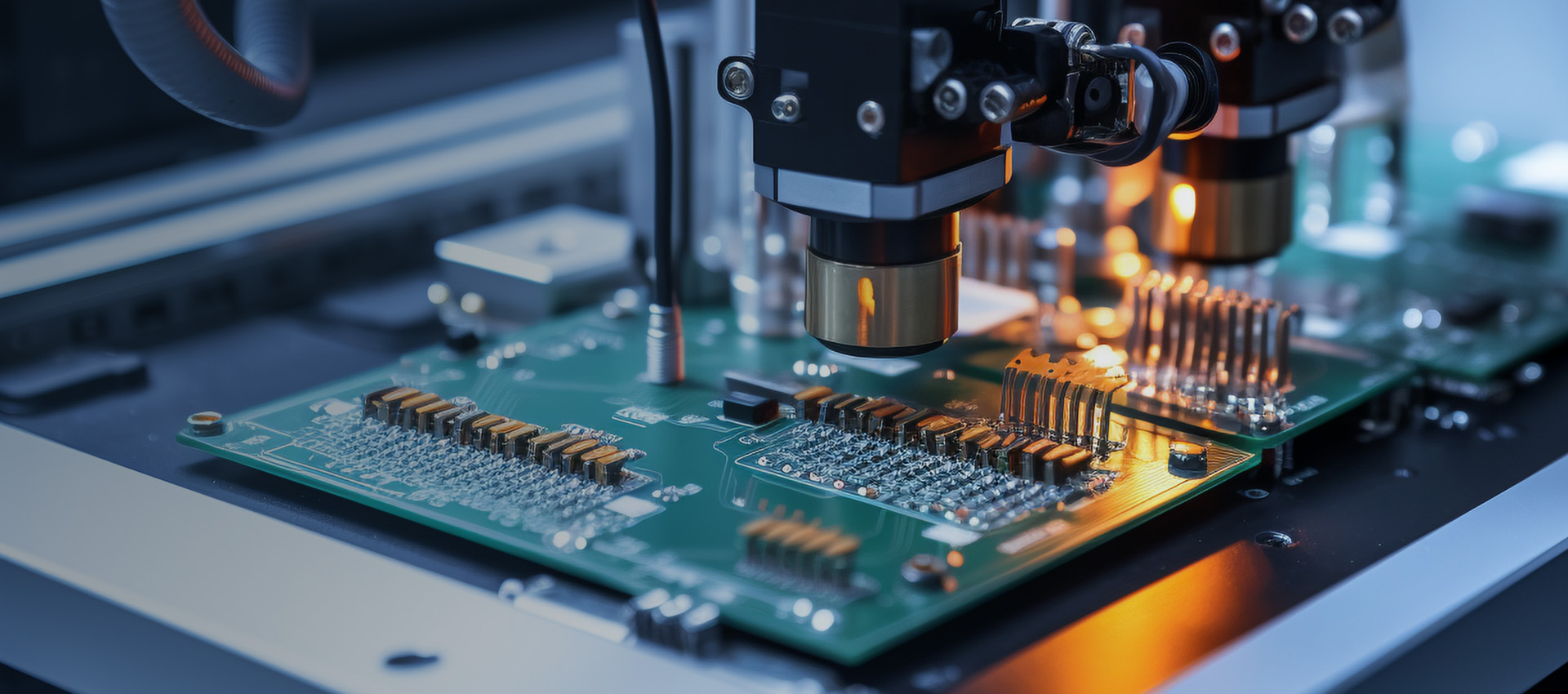
CCD視覺定位激光模切機是一種集成了CCD(電荷耦合器件)視覺系統(tǒng)和激光切割技術(shù)的先進設(shè)備,廣泛應用于包裝、電子、醫(yī)療器械和印刷等行業(yè)。它通過高精度攝像頭實時捕捉工件位置,結(jié)合激光進行快速、精確的模切操作,顯著提高了生產(chǎn)效率和產(chǎn)品質(zhì)量。然而,由于機械、視覺和環(huán)境因素的影響,設(shè)備在長期使用中容易出現(xiàn)定位偏差和切割誤差,因此校準與誤差控制成為確保其穩(wěn)定運行的關(guān)鍵環(huán)節(jié)。
校準旨在調(diào)整設(shè)備參數(shù),使其達到理想狀態(tài);而誤差控制則通過預防和補償手段,最小化各種干擾帶來的負面影響。本文將詳細探討CCD視覺定位激光模切機的校準流程、誤差來源及控制策略,以幫助用戶優(yōu)化設(shè)備性能。
校準過程
校準是確保CCD視覺定位激光模切機精度的基礎(chǔ)步驟,主要包括視覺系統(tǒng)校準和激光模切機校準兩部分。首先,CCD視覺系統(tǒng)的校準涉及攝像頭標定和圖像處理優(yōu)化。攝像頭標定通常使用標準標定板(如棋盤格圖案),通過拍攝多角度圖像,計算內(nèi)部參數(shù)(如焦距、畸變系數(shù))和外部參數(shù)(如位置和方向),以消除鏡頭畸變和視角誤差。這一過程需要借助專業(yè)軟件,例如OpenCV庫,進行自動或半自動處理。標定后,系統(tǒng)能夠準確地將圖像像素坐標轉(zhuǎn)換為實際物理坐標,實現(xiàn)高精度定位。
其次,激光模切機的校準包括激光頭位置、焦距和功率的調(diào)整。激光頭位置校準通過移動平臺測試,確保激光束與工作臺面垂直,并使用標準工件進行切割測試,驗證切割路徑的準確性。焦距校準則通過調(diào)整激光透鏡,使焦點落在材料表面,避免因散焦導致的切割不齊或材料損傷。功率校準涉及激光輸出能量的優(yōu)化,根據(jù)材料類型(如紙張、塑料或金屬)設(shè)置合適的功率參數(shù),以防止過度燒蝕或切割不足。
集成校準是最后一步,將視覺系統(tǒng)與激光模塊同步,通過模擬運行測試,確保視覺定位數(shù)據(jù)能實時驅(qū)動激光動作,減少系統(tǒng)延遲。整個校準過程需定期重復,尤其是在設(shè)備維護或環(huán)境變化后,以保持長期穩(wěn)定性。
誤差來源
CCD視覺定位激光模切機的誤差來源多樣,主要可分為機械、視覺、環(huán)境和系統(tǒng)誤差。機械誤差源于設(shè)備結(jié)構(gòu),例如導軌磨損、絲杠松動或振動,這些會導致激光頭移動不精確,進而產(chǎn)生位置偏差。長期使用中,機械部件的疲勞和熱膨脹也會引入累積誤差,影響切割輪廓的完整性。
視覺誤差主要由CCD攝像頭和圖像處理環(huán)節(jié)引起。光照變化是常見問題,不均勻照明可能導致圖像對比度下降,影響特征識別;攝像頭本身的噪聲、分辨率限制或鏡頭污漬也會降低定位精度。此外,圖像處理算法的延遲或錯誤,如邊緣檢測不準確,會進一步放大誤差。
環(huán)境誤差包括溫度、濕度和灰塵等因素。溫度波動可引起材料膨脹或收縮,改變實際尺寸;高濕度可能導致電氣元件性能下降,而灰塵積累會遮擋攝像頭或激光路徑,干擾正常運行。系統(tǒng)誤差則涉及軟件和通信方面,例如控制軟件的響應延遲、數(shù)據(jù)傳輸錯誤或坐標系轉(zhuǎn)換不精確,這些都會在高速生產(chǎn)中造成累積偏差。
誤差控制方法
為有效控制誤差,需采取綜合策略,包括預防性維護、軟件補償、硬件優(yōu)化和質(zhì)量控制。預防性維護是基礎(chǔ),定期檢查機械部件(如潤滑導軌、緊固螺絲)和清潔光學元件(如攝像頭鏡頭和激光窗口),可減少突發(fā)故障。同時,環(huán)境控制至關(guān)重要,通過安裝恒溫恒濕系統(tǒng)或防塵罩,最小化外部干擾。
軟件補償是核心手段,利用算法實時校正誤差。例如,在視覺系統(tǒng)中,應用圖像增強技術(shù)(如濾波和直方圖均衡)改善圖像質(zhì)量;通過運動控制算法預測和補償機械滯后,確保激光路徑與視覺定位同步。機器學習方法也可用于自適應調(diào)整,通過歷史數(shù)據(jù)訓練模型,自動優(yōu)化參數(shù)以應對變化條件。
硬件優(yōu)化包括升級高精度組件,如使用高分辨率CCD攝像頭、精密導軌和伺服電機,提升整體系統(tǒng)穩(wěn)定性。此外,集成傳感器(如溫度傳感器)進行實時監(jiān)控,可及時觸發(fā)調(diào)整機制。質(zhì)量控制環(huán)節(jié)則通過定期測試和驗證,使用標準樣品進行切割精度評估,并記錄誤差數(shù)據(jù),便于持續(xù)改進。實施統(tǒng)計過程控制(SPC)方法,能幫助識別趨勢,提前預防潛在問題。
總之,CCD視覺定位激光模切機的校準與誤差控制是一個系統(tǒng)工程,需結(jié)合技術(shù)和管理手段。通過規(guī)范校準流程、識別誤差來源并實施多層次控制,用戶可顯著提升設(shè)備可靠性和產(chǎn)品合格率。未來,隨著人工智能和物聯(lián)網(wǎng)技術(shù)的發(fā)展,智能校準和預測性維護將成為趨勢,進一步推動工業(yè)自動化的進步。
問答部分
1.問:什么是CCD視覺定位在激光模切機中的作用?
答:CCD視覺定位在激光模切機中主要用于實時檢測和精確定位工件。通過攝像頭捕捉圖像,系統(tǒng)分析工件的位置、形狀和方向,并將數(shù)據(jù)反饋給控制單元,驅(qū)動激光頭進行準確切割。這消除了傳統(tǒng)機械定位的局限性,提高了適應性和精度,特別適用于復雜圖案或小批量生產(chǎn)。
2.問:如何校準CCD攝像頭以減少視覺誤差?
答:校準CCD攝像頭通常使用標定板(如棋盤格),在多角度下拍攝圖像,計算內(nèi)部參數(shù)(如焦距和畸變)和外部參數(shù)(如位置)。通過軟件工具(如OpenCV)進行畸變校正和坐標轉(zhuǎn)換,確保圖像像素與實際尺寸一致。定期清潔鏡頭和優(yōu)化光照條件也能輔助減少誤差。
3.問:常見的誤差來源有哪些,如何優(yōu)先處理?
答:常見誤差包括機械磨損、視覺噪聲、環(huán)境變化和系統(tǒng)延遲。優(yōu)先處理應基于影響程度:首先解決機械問題(如導軌維護),因為它們是基礎(chǔ);然后處理視覺和環(huán)境因素(如優(yōu)化光照和控制溫度);最后通過軟件更新減少系統(tǒng)誤差。定期評估和記錄數(shù)據(jù)有助于確定優(yōu)先級。
4.問:如何減少環(huán)境因素導致的誤差?
答:減少環(huán)境誤差可通過控制溫度、濕度和清潔度實現(xiàn)。例如,安裝空調(diào)或除濕器保持穩(wěn)定環(huán)境;使用密封罩防止灰塵進入光學系統(tǒng);定期監(jiān)控環(huán)境參數(shù)并調(diào)整設(shè)備設(shè)置。此外,選擇耐環(huán)境干擾的硬件組件也能增強魯棒性。
5.問:誤差控制中軟件補償是如何工作的?
答:軟件補償通過算法實時調(diào)整設(shè)備參數(shù)來校正誤差。例如,在視覺系統(tǒng)中,應用圖像處理算法增強特征識別;在運動控制中,使用預測模型補償機械滯后。數(shù)據(jù)驅(qū)動方法,如機器學習,可分析歷史誤差模式,自動優(yōu)化切割路徑或功率設(shè)置,實現(xiàn)自適應控制,提升整體精度。
推薦新聞
-
小型激光切割機行業(yè)應用案例
小型激光切割機作為一種高效、精密的加工工具,近年來在多個行業(yè)中得到了廣泛應用。它利用高能量...
2025-10-06 -
紫外激光打標機 355nm 冷加工 多材質(zhì)高精度雕刻設(shè)備
355nm紫外激光打標機:冷加工賦能多材質(zhì)高精度雕刻在精密制造領(lǐng)域,激光打標技術(shù)的精準度與材質(zhì)...
2026-01-12 -
CCD視覺定位加持!博特精密光纖激光打標機助力電子制造業(yè)效率翻倍
CCD視覺定位!博特精密光纖激光打標機助力電子制造業(yè)在電子制造業(yè)邁向高精度、自動化、柔性化生...
2026-01-10 -
碳化硅切割速度低下:傳統(tǒng)機械鋸切效率<1mm/s
碳化硅(SiC)因其高硬度、高導熱性、耐高溫和優(yōu)異的化學穩(wěn)定性,被廣泛應用于功率半導體、LED襯...
2025-06-09 -
火眼金睛:全面識別劣質(zhì)激光切割機方法
激光切割機作為現(xiàn)代制造業(yè)的核心設(shè)備之一,其質(zhì)量直接關(guān)系到生產(chǎn)效率、加工精度和長期使用成本。...
2025-10-06 -
微流控芯片激光共聚焦顯微技術(shù)的融合創(chuàng)新
微流控芯片技術(shù)與激光共聚焦顯微鏡的結(jié)合,為現(xiàn)代生物醫(yī)學研究提供了高精度、高通量的微觀觀測平...
2025-07-16 -
指紋芯片硅晶圓熱損傷:熱影響區(qū)HAZ降低芯片電性能
在智能設(shè)備日益普及的今天,指紋識別芯片作為核心的生物識別組件,廣泛應用于手機、門禁、金融支...
2025-09-16 -
小型激光切割機技術(shù)白皮書
本白皮書旨在闡述小型激光切割機的核心技術(shù)、設(shè)備構(gòu)成、應用領(lǐng)域及未來發(fā)展趨勢。隨著數(shù)字化制造...
2025-10-06
